Příklad 6
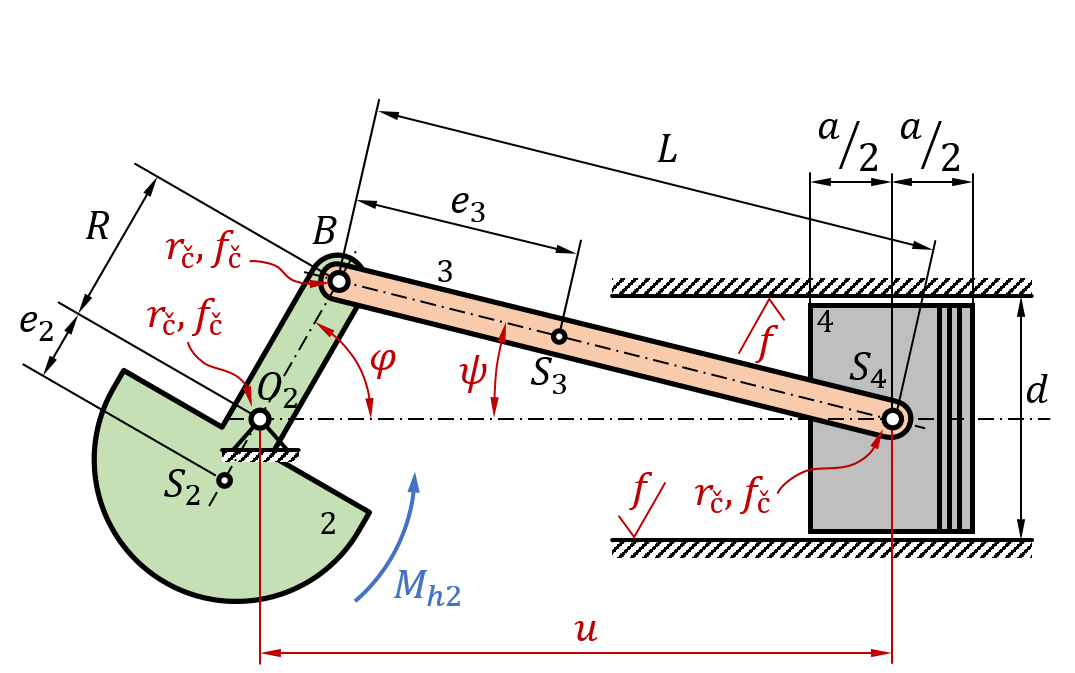
Dána soustava těles dle obrázku (klikový mechanismus) s rotačními vazbami (v bodech \( O_2,B\) a \(S_4\)), těleso 4 (píst) je vedeno ve vodorovném vedení (válec) se třením. Systém je poháněn hnacím momentem \(M_{h2}\) na tělese 2 (klice).
Dáno
rozměry \(R, e_2, L, e_3, a, d \)
setrvačné parametry těles \(m_2,J_{O2}, m_3, J_{S3}, m_4\)
parametry pasivních odporů \( f, r_č, f_č \),
Určete
a) zakreslete dynamické uvolnění jednotlivých těles v obecné poloze a specifikujte dynamické účinky
b) sestavte kompletní soustavu rovnic pro popis dynamiky soustavy