Příklad 4
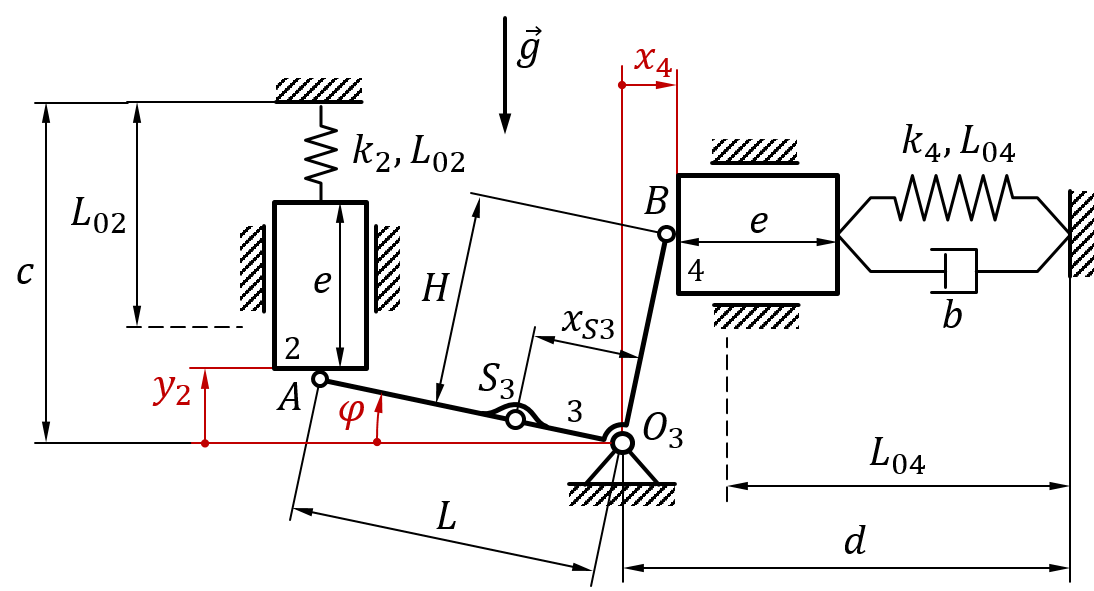
Soustava těles dle obrázku bez pasivních odporů. Těleso 2 je k rámu připojeno pružinou tuhosti \( k_2 \) a volné délky \( L_{02} \). Těleso 4 je k rámu připojeno pružinou tuhosti \( k_4 \) volné délky \(L_{04} \) a lineárním tlumičem s konstantou úměrnosti \( b \). Těleso 3 (těžiště \( S_3 \)) je k rámu připojeno rotační vazbou v bodě \( O_3 \), bod \( A \) resp. \( B \) tělesa 3 se dotýká tělesa 2 resp. 4.
Dáno
rozměry \( L, H,c,d,e, x_{s3} \)
hmotnostní parametry těles \( m_2,m_3,J_{03},m_4 \)
tíhové zrychlení \( g \)
parametry pružin \( k_2,L_{02},k_4,L_{04} \)
konstanta úměrnosti tlumiče \( b \)
Určete
Sestavte pohybovou rovnici soustavy redukcí na souřadnici \( x_4 \)
Během výpočtu předpokládejte: \(-5° < \varphi < 5° \)