Příklad 12
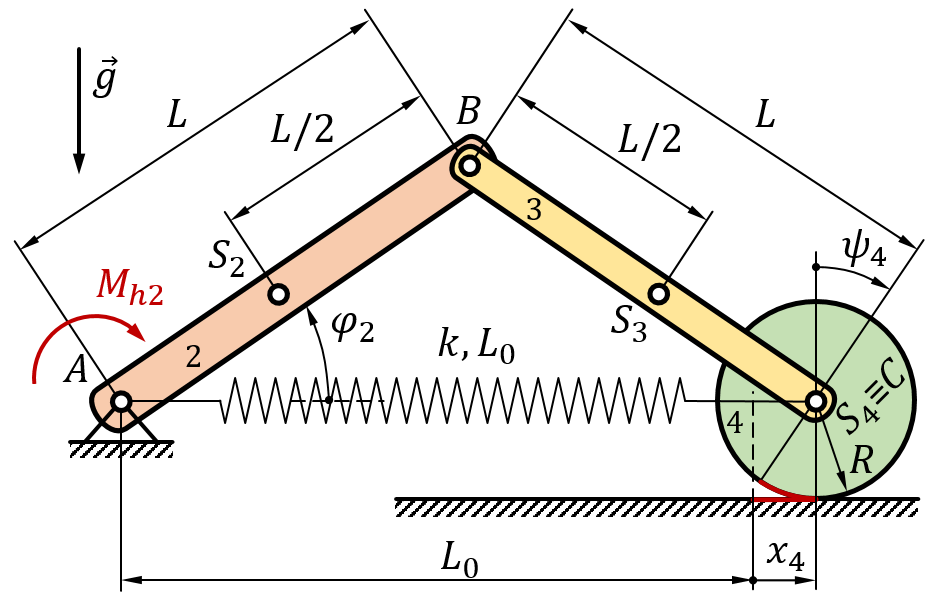
Dána soustava těles bez pasivních odporů dle obrázku — tělesa 2 a 3 jsou ramena stejné délky s rotačními vazbami (v bodech \( A \), \( B \) a \( C \)), těleso 4 (vyvážený válec) se valí po vodorovné podložce, Systém je poháněn hnacím momentem \( M_{h2} \) na tělese 2.
Dáno
rozměry \( R, L \)
setrvačné parametry těles \( m_2, J_{A2}, m_3, J_{S3}, m_4, J_{S4} \)
tíhové zrychlení \( g \)
hnací moment \( M_{h2} \)
parametry pružiny \( k, L_0 \)
Určete
a) sestavte hlavní pohybovou rovnici soustavy redukcí na \( x_4 \)
b) rovnovážnou polohu \( X_{4stat} \)