Soustava těles bez pasivních odporů řešená uvolňovací metodou
Zadání
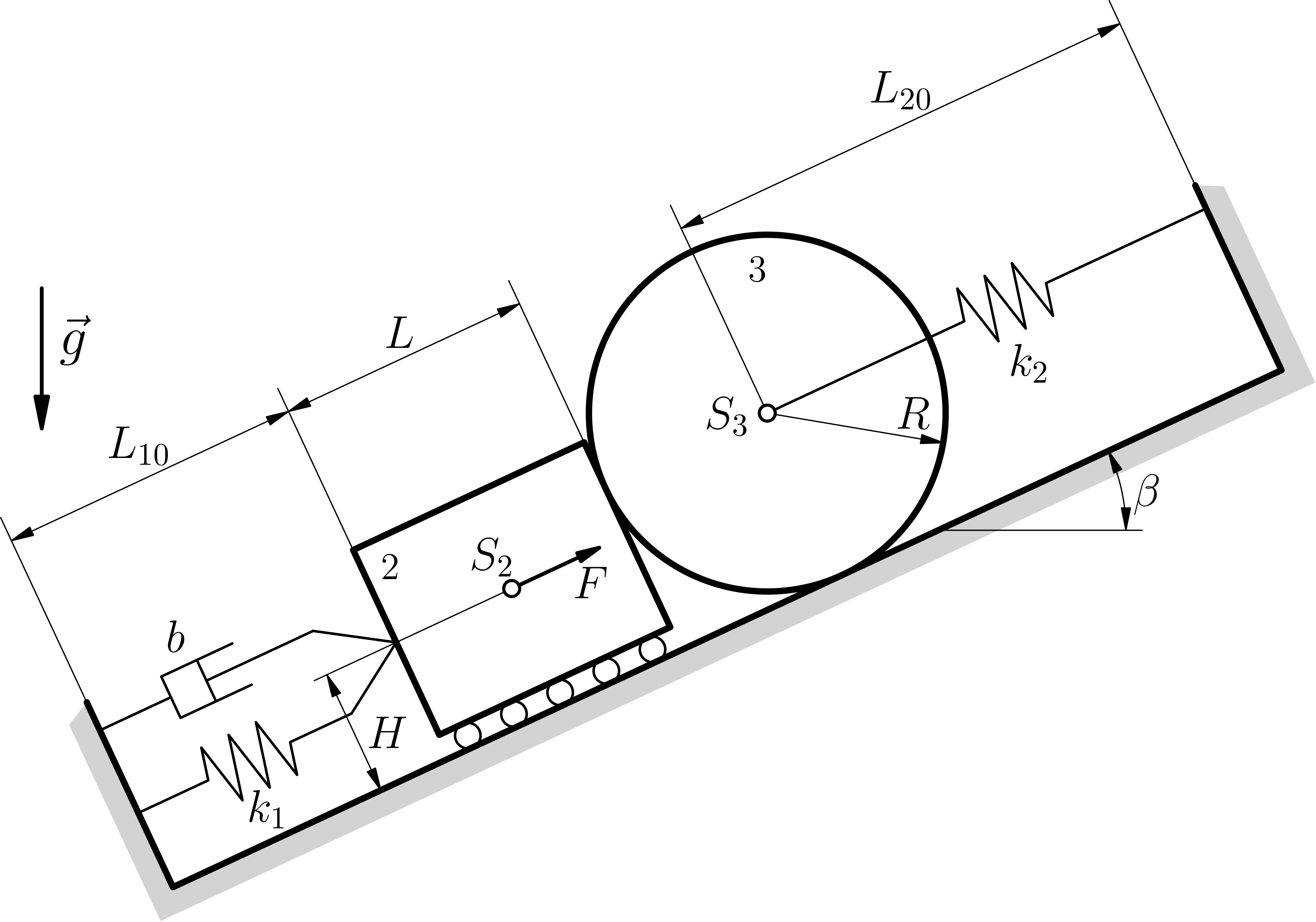
Soustava těles dle obrázku se pohybuje po nakloněné rovině bez uvažování pasivních odporů za pomoci zadané síly \(F\). Sestavte pohybovou rovnici za použití uvolňovací metody.
Obrázek
$$ \newcommand{\dif}{\mathrm{d}} $$
Dáno: \(\class{hmotnost}{m_2}\), \(\class{hmotnost}{m_3}\), \(\class{polomer}{R}\), \(\class{vyska}{H}\), \(\class{uhel_nakloneni}{\beta}\), \(\class{moment_setrvacnosti}{J_{S3}}\), \(\class{konstanta}{k_1}\), \(\class{volna_delka}{L_{10}}\), \(\class{konstanta}{k_2}\), \(\class{volna_delka}{L_{20}}\), \(\class{tlumeni}{b}\), \(\class{soucinitel_treni}{(f)}\), \(\class{sila}{F}\).
Odvoďte pohybovou rovnici.
Řešení
-
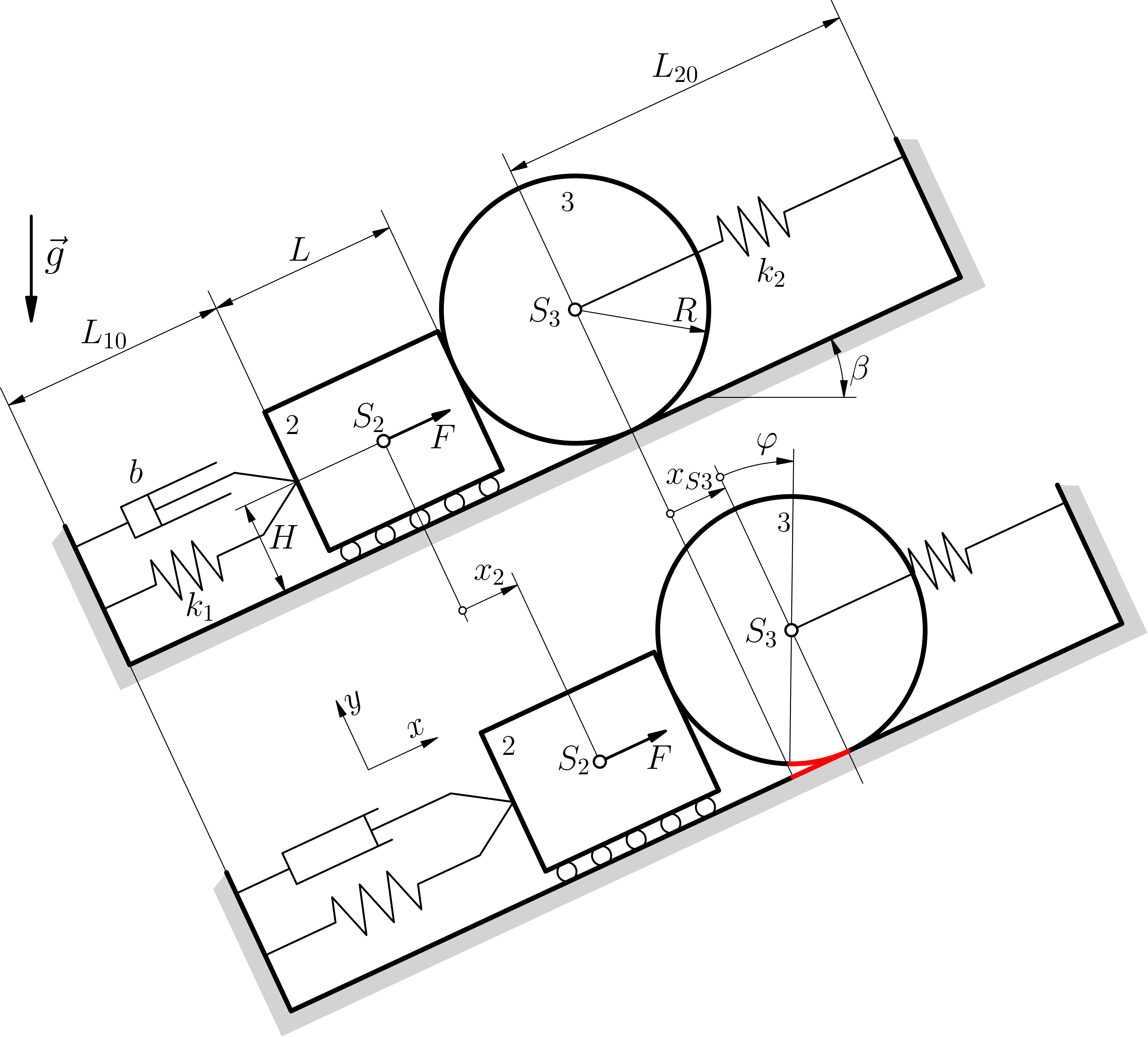
Protože zadání není zakresleno v obecné poloze, překreslíme si obrázek do obecné polohy a definujeme si polohy jednotlivých těles.
-
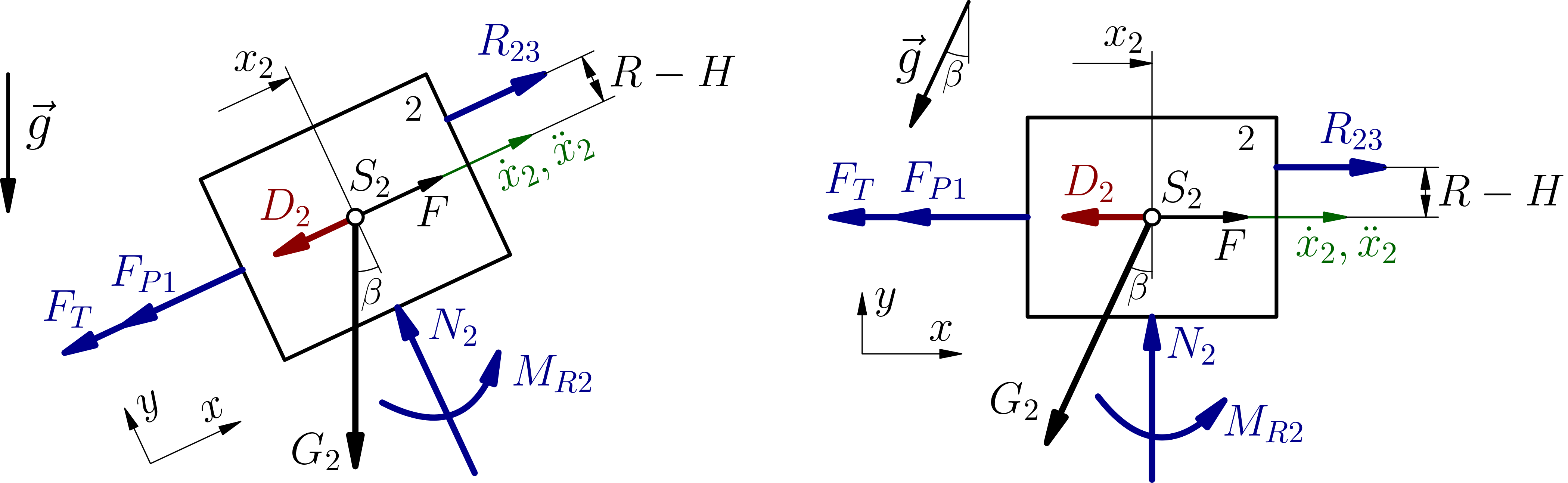
Tělesa uvolníme a v obecné poloze zakreslíme vnější a reakční síly známé ze statiky (reakce od podložky a sousedících těles, síly od pružin a tlumičů, tíhy, vnější zatížení, ...).
-
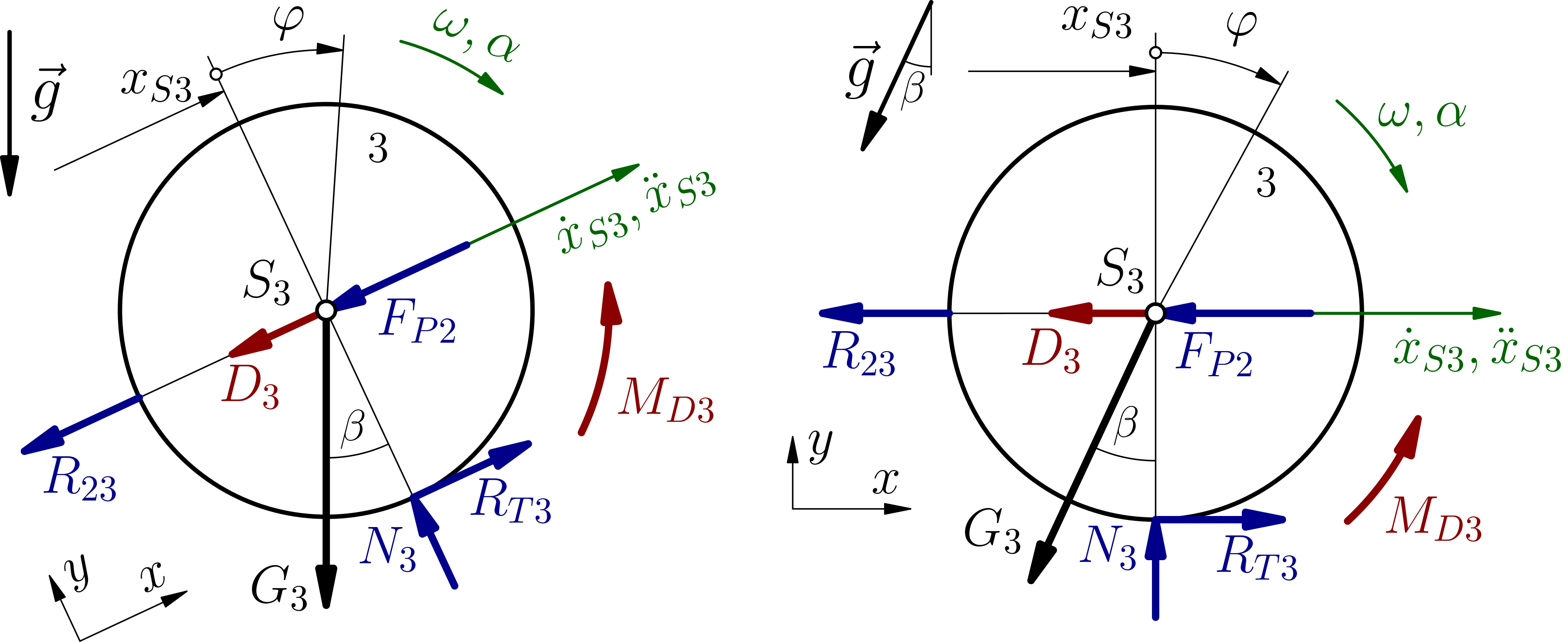
Určíme druh pohybu pro jednotlivá tělesa. V našem případě se těleso 2 pohybuje posuvným pohybem s kladnou rychlostí šikmo vpravo nahoru. Těleso 3 se pohybuje obecným rovinným pohybem s kladným smyslem úhlového zrychlení po směru hodinových ručiček.
-
Zakreslíme d'Alembertovu sílu \(D_2\) do těžiště tělesa 2 \(S_2\).
-
Zvolíme si referenční bod na tělese 3 (ideálně těžiště \(S_3\)). Zavedeme d'Alembertovu sílu \(D_3\) do těžiště tělesa 3. Jelikož je referenční bod zároveň těžištěm tělesa 3, bude odstředivá a tečná dynamická síla rovna nule. Posledním dynamickým účinkem je tedy dynamický moment, působící proti úhlovému zrychlení.
Zakreslení v obecné poloze
Obrázek uvolnění
Těleso 2
Těleso 3
Rovnice dynamické rovnováhy sestavíme pro každé těleso zvlášť v lokálním souřadnicovém systému (x,y).
Pro těleso 2:
$$ \begin{align} \swarrow x &:\, F_{T}+F_{P1}+D_2-F-R_{23}+m_2\,g\sin(\beta)=0, \newline \nwarrow y &:\, N_2-m_2\,g\cos(\beta)=0, \newline \curvearrowright S_2 &:\, M_{R1}-R_{23}(R-H)=0. \end{align} $$
Pro těleso 3:
$$ \begin{align} \swarrow x &:\, R_{23}+D_3+F_{P2}-R_{T3}+m_3\,g\sin(\beta)=0, \newline \nwarrow y &:\, N_3-m_3\,g\cos(\beta)=0, \newline \curvearrowright S_3 &:\, M_{D3}+R_{T3}R=0. \end{align} $$
Specifikujme nyní jednotlivé síly, které jsme použili v rovnicích dynamické rovnováhy.
Síla v tlumiči je rovna součinu koeficientu tlumení \(b\) a pístové rychlosti tlumiče \(\dot{x}_2\)
$$F_T=b\, \dot{x}_{2}.$$
Síla v pružině \(F_{P1}\) je úměrná tuhosti \(k_1\) a deformaci od volné délky. Vzhledem k vhodně zvolenému kótování polohy tělesa 2 je deformace pružiny právě rovna hodnotě \(x_2\) a tedy
$$F_{P1}=k_1\,x_2.$$
d'Alembertova setrvačná síla \(D_2\) je rovna součinu hmotnosti tělesa \(m_2\) a zrychlení libovolného bodu na tělese (vycházíme z vlastností posuvného pohybu tělesa)
$$D_2=m_2 \, \ddot{x}_2.$$
d'Alembertova setrvačná síla \(D_3\) je rovna součinu hmotnosti tělesa \(m_3\) a zrychlení referenčního bodu \(S_3\) na tělese 3 (vycházíme z vlastností obecného rovinného pohybu tělesa). Zrychlení
$$D_2=m_3 \, \ddot{x}_{S3}.$$
Síla v pružině \(F_{P2}\) je úměrná tuhosti \(k_2\) a deformaci od volné délky. Vzhledem k vhodně zvolenému kótování polohy tělesa 3 právě od volné délky je deformace pružiny rovna hodnotě \(x_3\) a tedy
$$F_{P2}=k_2\,x_3.$$
Setrvačný (dynamický) moment \(M_{D3}\) je roven součinu úhlového zrychlení a momentu setrvačnosti k referenčnímu bodu \(S_3\)
$$M_{D3}=J_{S3}\,\alpha.$$
Po dosazení do rovnic dynamické rovnováhy dostaneme:
$$ \begin{align} b\dot x_2 + k_1\,x_2 + m_2\,\ddot x_2-F-R_{23} + m_2\,g\sin{(\beta)} &=0 \qquad (1) \newline N_2-m_2\,g\cos(\beta) &=0 \qquad (2) \newline M_{R1}-R_{23}(R-H) &=0 \qquad (3) \newline R_{23}+m_3 \ddot x_{S3} + k_2 x_3 - R_{T3} + m_3 g \sin{( \beta )} &= 0 \qquad (4) \newline N_3-m_3\,g\cos(\beta) &=0 \qquad (5) \newline J_{S3}\,\alpha+R_{T3}R &=0 \qquad (6) \end{align} $$
Nyní máme soustavu 6 rovnic pro neznámé \( x_2\), \(R_{23}\), \(N_2\), \(M_{R1}\), \(\ddot x_{S3}\), \(x_3\), \(R_{T3}\), \(N_3\), \(\alpha \), tj. 9 neznámých.
Musíme pro řešení přidat kinematické rovnice: Vzdálenost \(A\) mezi stěnami rámu je konstantní a v počáteční poloze ji lze zapsat jako $$L=L_{10}+L+R+L_{20},$$ zatímco v obecné poloze $$L=L_{10}+x_2+L+R-x_3+L_{20}.$$
Srovnáním obou výrazů dostaneme
\begin{equation} \cancel{L_{10}} + \cancel{L} + \cancel{R} + \cancel{L_{20}} = \cancel{L_{10}} + x_2 + \cancel{L} + \cancel{R} - x_3 + \cancel{L_{20}} \Rightarrow x_2 - x_3 = 0 \Rightarrow x_2 = x_3. \end{equation}
Polohu referenčního bodu \(S_3\) lze vyjádřit jako $$x_{S3}=L_{10}+x_2+L+R,$$ což po dvojím zderivování dává
$$ \dot x_{S3}=\dot x_2 \rightarrow \ddot x_{S3}=\ddot x_2. $$
Třetí kinematickou rovnicí je vztah mezi zrychlením středu válce \(\ddot x_{S3}\) a úhlovou rychlostí \(\alpha\) při valení
$$ \ddot x_{S3}=R\,\alpha \Rightarrow \alpha=\frac{\ddot x_{S3}}{R}=\frac{\ddot x_{2}}{R} $$
Pohybovou rovnici sestavíme s pomocí rovnice (6), do které dosadíme za neznámou \(R_{T3}\) z rovnice (4). Tím si ovšem přidáme neznámou \(R_{23}\). Hodnotu \(R_{23}\) lze přímo vyjádřit z rovnice (1).
$$(6) \rightarrow J_{S3} \frac{\ddot x_2}{R} + \,R_{T3} R = 0$$
$$(4) \rightarrow R_{T3}=R_{23}+m_3\,\ddot x_{S3}+k_2\,x_3+m_3\,g\sin(\beta) $$
$$(1) \rightarrow R_{23} = b\,\dot{x}_2 + k_1\,x_2 + m_2\,\ddot x_2-F+m_2\,g \sin{(\beta)} $$
Dosazením z kinematických rovnic dostaneme pohybovou rovnici: $$ J_{S3} \frac{\ddot{x}_2}{R} + \left( b \dot{x}_2 + k_1 x_2 + m_2 \ddot{x}_2 - F + m_2 g \sin{(\beta)} + m_3 \ddot{x}_2 + k_2 x_2 + m_3 g \sin{(\beta)} \right) R =0. $$
Rovnici vydělíme \(R\) a seřadíme členy dle derivací \(x_2\), čímž dostaneme hledaný konečný tvar pohybové rovnice:
$$ \ddot{x_2} \left( \frac{J_{S3}}{R^2} +m_2 + m_3 \right) \dot{x}_2 b +x_2\left( k_1 + k_2 \right) = F - g \sin{\beta} \left( m_2 + m_3\right). $$