Příklad 1
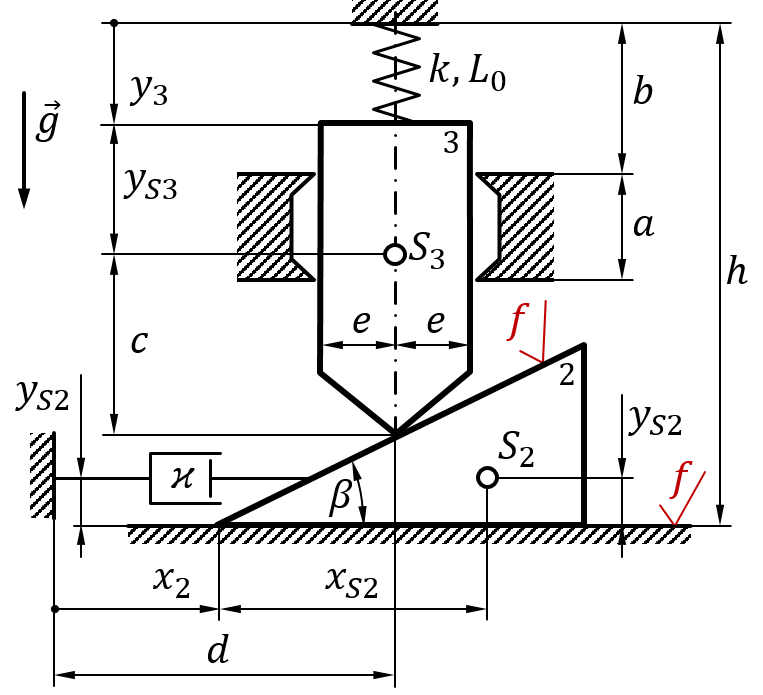
Soustava těles dle obrázku je podrobena vazbám. Těleso 3 je vedeno svislým vedením BEZ tření a k základnímu rámu je připojeno pružinou tuhosti \( k \) s volnou délkou \( L_0 \). Těleso 2 je vedeno podél vodorovné roviny se třením a se základním rámem je spojeno tlumičem s konstantou úměrnosti \( \varkappa \) (síla v tlumiči \( F_t = \varkappa v_2 \)). V místě dotyku mezi tělesy 2 a 3 rovněž dochází ke tření.
Dáno
rozměry \( a, b, c, d, e, h, x_{S2}, y_{S2}, y_{S3}, \beta \)
hmotnosti těles \( m_2, m_3 \)
tíhové zrychlení \( g \)
součinitel smykového tření \( f \)
parametry pružiny \( k, L_0 \) a tlumiče \( \varkappa \)
Určete
a) zakreslete dynamické uvolnění jednotlivých těles
v obecné poloze a specifikujte dynamické účinky
b) sestavte kompletní soustavu rovnic pro popis dynamiky
soustavy